Cut Meshes
asmesh has set of functions to cut mesh, you can find it in this header.
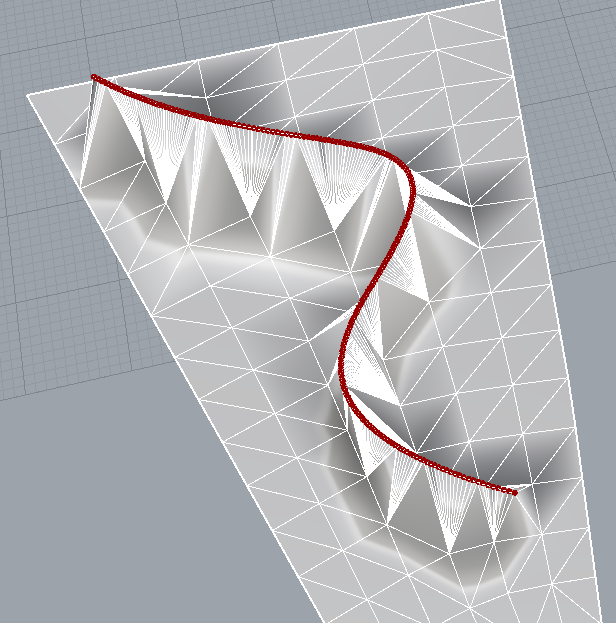
Suggested steps
1.Project points of your polyline to mesh
#include "MRMesh/MRMeshProject.h"
struct MeshProjectionResult
{
/// the closest point on mesh, transformed by xf if it is given
PointOnFace proj;
/// its barycentric representation
MeshTriPoint mtp;
/// squared distance from pt to proj
float distSq = 0;
};
///
/**
* \brief computes the closest point on mesh (or its region) to given point
* \param upDistLimitSq upper limit on the distance in question, if the real distance is larger than the function exits returning upDistLimitSq and no valid point
* \param xf mesh-to-point transformation, if not specified then identity transformation is assumed
* \param loDistLimitSq low limit on the distance in question, if a point is found within this distance then it is immediately returned without searching for a closer one
* \param skipFace this triangle will be skipped and never returned as a projection
*/
[[nodiscard]] MRMESH_API MeshProjectionResult findProjection( const Vector3f & pt, const MeshPart & mp,
float upDistLimitSq = FLT_MAX,
const AffineXf3f * xf = nullptr,
float loDistLimitSq = 0,
FaceId skipFace = {} );
2.Convert result vector to cutMesh input type:
#include "MRMesh/MRContoursCut.h"
/** \ingroup BooleanGroup
* \brief Makes closed continuous contour by mesh tri points
*
* Finds shortest paths between neighbor \p meshTriPoints and build closed contour MR::cutMesh input
*/
MRMESH_API OneMeshContour convertMeshTriPointsToClosedContour( const Mesh& mesh, const std::vector<MeshTriPoint>& meshTriPoints );
Note that conversion is not 1 to 1, so output contour may contain other amount of items than input one
3.Do cutMesh (it works only with contours without self-intersections)
#include "MRMesh/MRContoursCut.h"
/** \struct MR::CutMeshResult
* \ingroup BooleanGroup
* This structure contains result of MR::cutMesh function
*/
struct CutMeshResult
{
/// Paths of new edges on mesh, they represent same contours as input, but already cut
std::vector<EdgePath> resultCut;
/// Bitset of bad triangles - triangles where input contours have intersections and cannot be cut and filled in a good way
/// \sa \ref MR::CutMeshParameters
FaceBitSet fbsWithCountourIntersections;
};
/** \ingroup BooleanGroup
* \brief Cuts mesh by given contours
*
* This function cuts mesh making new edges paths on place of input contours
* \param mesh Input mesh that will be cut
* \param contours Input contours to cut mesh with, find more \ref MR::OneMeshContours
* \param params Parameters describing some cut options, find more \ref MR::CutMeshParameters
* \return New edges that correspond to given contours, find more \ref MR::CutMeshResult
* \parblock
* \warning Input contours should have no intersections, faces where contours intersects (`bad faces`) will not be allowed for fill
* \endparblock
* \parblock
* \warning Input mesh will be changed in any case, if `bad faces` are in mesh, mesh will be spoiled, \n
* so if you cannot guarantee contours without intersections better make copy of mesh, before using this function
* \endparblock
*/
MRMESH_API CutMeshResult cutMesh( Mesh& mesh, const OneMeshContours& contours, const CutMeshParameters& params = {} );
resultCut has 1 to 1 mapping to cutMesh input contours
4.Pull resultCut vertices to corresponding original polyline positions
#include "MRMesh/MRPolylineProject.h"
template<typename V>
struct PolylineProjectionResult
{
/// closest line id on polyline
UndirectedEdgeId line;
/// closest point on polyline, transformed by xf if it is given
V point;
/// squared distance from pt to proj
float distSq = 0;
};
/**
* \brief computes the closest point on polyline to given point
* \param upDistLimitSq upper limit on the distance in question, if the real distance is larger than the function exists returning upDistLimitSq and no valid point
* \param xf polyline-to-point transformation, if not specified then identity transformation is assumed
* \param loDistLimitSq low limit on the distance in question, if a point is found within this distance then it is immediately returned without searching for a closer one
*/
MRMESH_API PolylineProjectionResult3 findProjectionOnPolyline( const Vector3f& pt, const Polyline3& polyline,
float upDistLimitSq = FLT_MAX, AffineXf3f* xf = nullptr, float loDistLimitSq = 0 );
This should work for common cases, complex polylines with self-intersections may require some preprocessing.