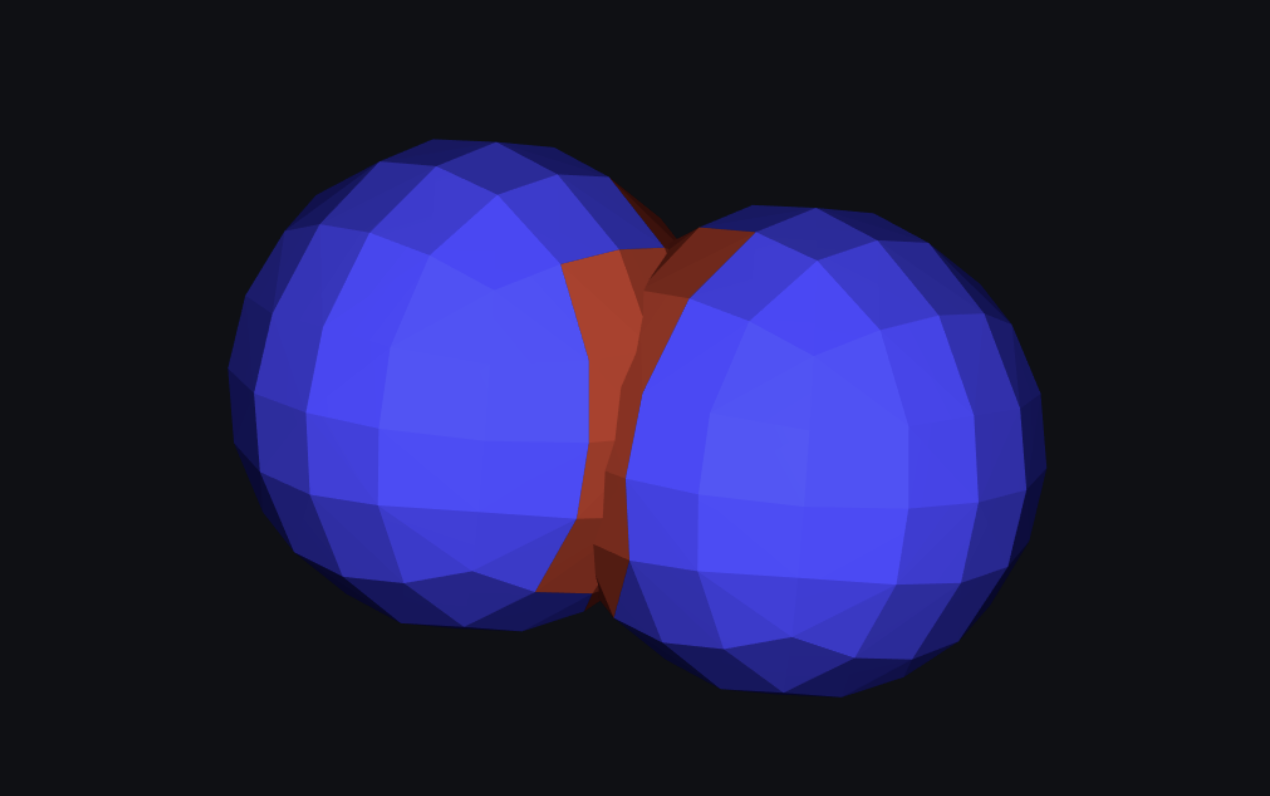
How to get the faces which are penetrating the colliding mesh?
Get the faces data of the collision area of the mesh.

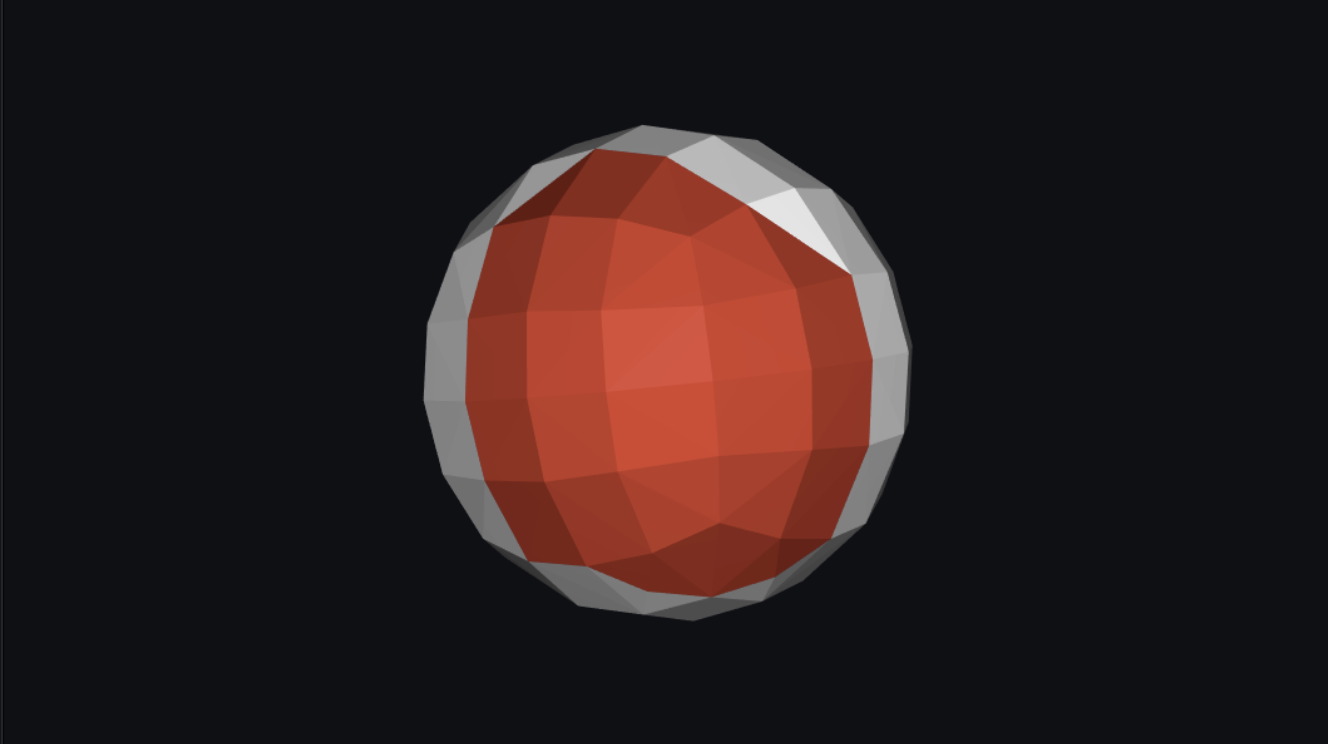
Simple Cases
Try to use boundaries of the selection to fill its inner part using:
MeshLib/source/MRMesh/MRRegionBoundary.h
Lines 27 to 31 in 2129ff0
/// returns all region boundary loops;
/// every loop has region faces on the right, and not-region faces or holes on the left
[[nodiscard]] MRMESH_API std::vector<EdgeLoop> findRightBoundary( const MeshTopology & topology, const FaceBitSet * region = nullptr );
[[nodiscard]] inline std::vector<EdgeLoop> findRightBoundary( const MeshTopology & topology, const FaceBitSet & region )
{ return findRightBoundary( topology, ®ion ); }
and
MeshLib/source/MRMesh/MRFillContour.h
Lines 8 to 10 in 2129ff0
// fill region located to the left from given edges
MRMESH_API FaceBitSet fillContourLeft( const MeshTopology & topology, const EdgePath & contour );
MRMESH_API FaceBitSet fillContourLeft( const MeshTopology & topology, const std::vector<EdgePath> & contours );
To do so, you need to find longest loop (in your case). But in common case loops could have complex topology.
Other way is to use
MeshLib/source/MRMesh/MRMeshBoolean.h
Lines 103 to 121 in 2129ff0
/// vertices and points representing mesh intersection result
struct BooleanResultPoints
{
VertBitSet meshAVerts;
VertBitSet meshBVerts;
std::vector<Vector3f> intersectionPoints;
};
/** \brief Returns the points of mesh boolean's result mesh
*
* \ingroup BooleanGroup
* Returns vertices and intersection points of mesh that is result of boolean operation of mesh `A` and mesh `B`.
* Can be used as fast alternative for cases where the mesh topology can be ignored (bounding box, convex hull, etc.)
* \param meshA Input mesh `A`
* \param meshB Input mesh `B`
* \param operation Boolean operation to perform
* \param rigidB2A Transform from mesh `B` space to mesh `A` space
*/
MRMESH_API Expected<BooleanResultPoints,std::string> getBooleanPoints( const Mesh& meshA, const Mesh& meshB, BooleanOperation operation,
with BooleanOperation::InideA or BooleanOperation::InideB, and use result VertBitSet.
Find Penetration
The code snippet for reference:
mesh1 = mm.loadMesh(mesh1Path)
mesh2 = mm.loadMesh(mesh2Path)
booleanVertices = mm.getBooleanPoints(mesh1, mesh2, mm.BooleanOperation.Intersection)
mesh1Verts = booleanVertices.meshAVerts
mesh2Verts = booleanVertices.meshBVerts
meshPoints = mm.MeshOrPoints(mesh1)
getPoint = meshPoints.points()
pointVectors = list()
for verts in mesh1Verts:
pointVectors.append(getPoint._Subscript(verts))
dir = mesh2.computeBoundingBox().center() - mesh1.computeBoundingBox().center()
meshPart = mm.MeshPart(mesh2)
dist = list()
for point in pointVectors:
line = mm.Line3f(point, dir)
rayIntersectionResult = mm.rayMeshIntersect(meshPart, line)
if(rayIntersectionResult.__bool__()):
print(rayIntersectionResult.distanceAlongLine)
dist.append(rayIntersectionResult.distanceAlongLine)
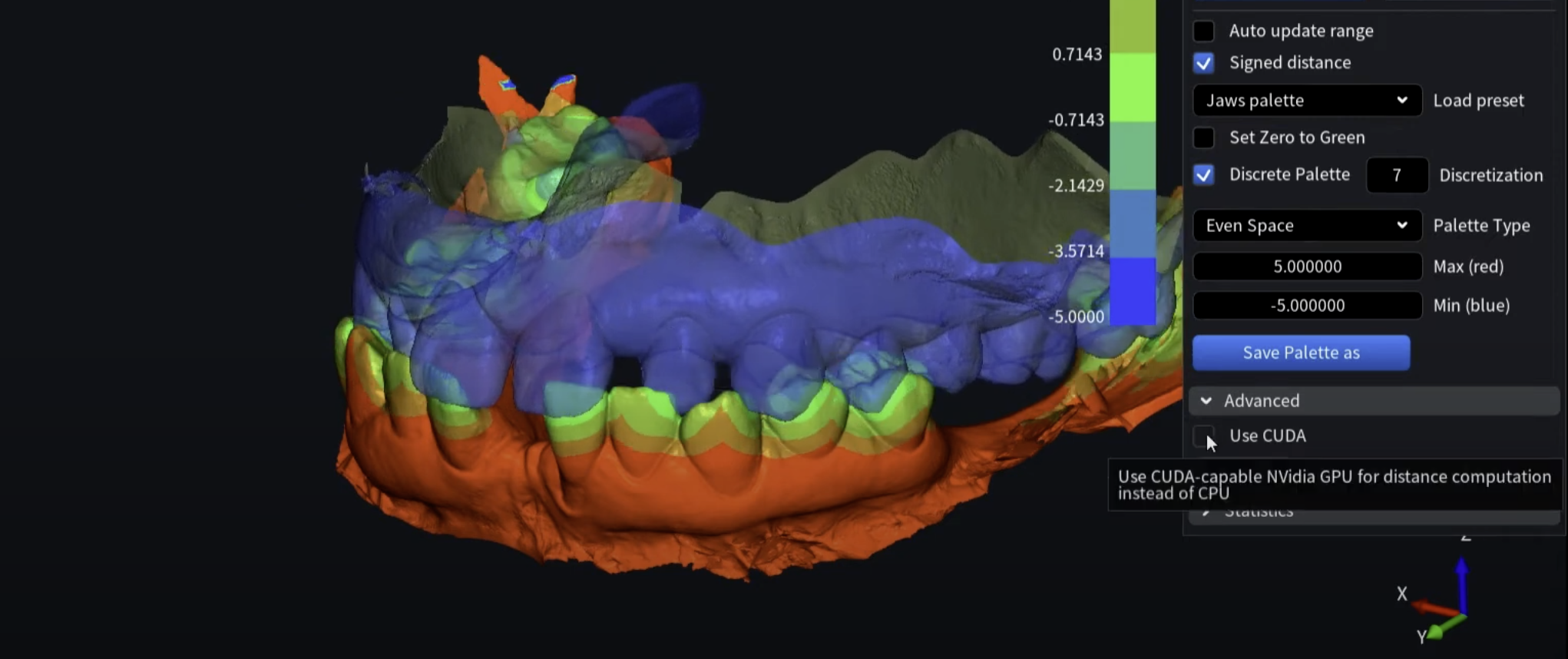
Mode Depth
In MeshLib/source/MRMesh/MRMeshMeshDistance.h
Lines 41 to 47 in a4345b1
/**
* \brief computes minimal distance between two meshes
* \param rigidB2A rigid transformation from B-mesh space to A mesh space, nullptr considered as identity transformation
* \param upDistLimitSq upper limit on the positive distance in question, if the real distance is larger than the function exists returning upDistLimitSq and no valid points
*/
MRMESH_API MeshMeshSignedDistanceResult findSignedDistance( const MeshPart & a, const MeshPart & b,
const AffineXf3f* rigidB2A = nullptr, float upDistLimitSq = FLT_MAX );
Or you can use double version of rayMeshIntersect() to avoid precision issues. (we use precise predicates inside). To do so you need to use Line3d instead of Line3f.